HabSim: testing deep space habitat resilience
HabSim: testing deep space habitat resilience
Resilient Extra-Terrestrial Habitat institute (RETHi) is a NASA-funded Space Technology Research Institute based at Purdue. Its goal is to further space exploration by developing resilient and autonomous deep space habitats which are able to anticipate and adapt to possible threats; contain sensors that can learn, detect, and diagnose issues; and utilize autonomous robots that maintain the habitat when humans are not present.
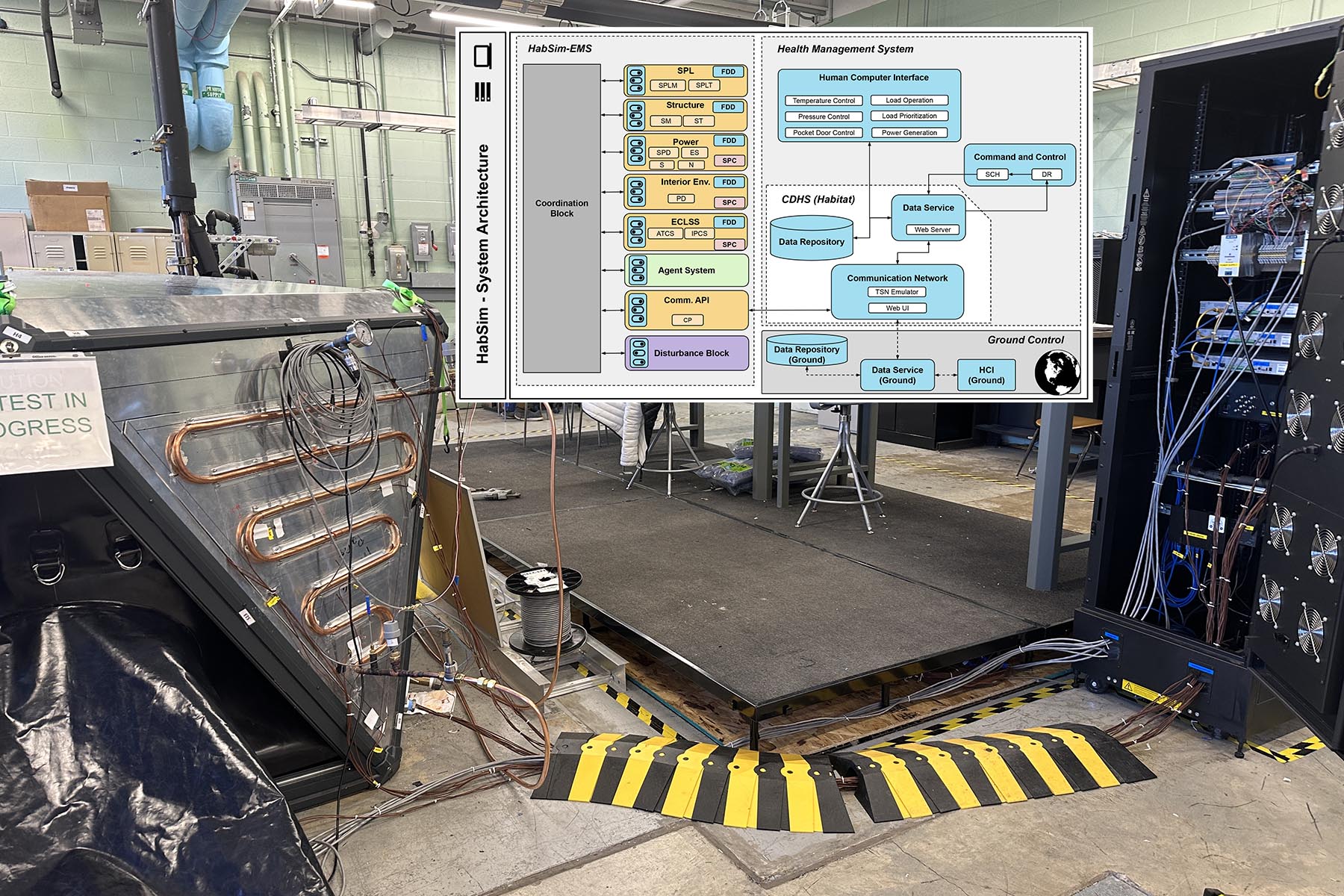
HabSim is part of the SmartHab cyber-physical testbed, located at Purdue’s Herrick Labs. The testbed is comprised of certain selected physical components, coupled with a number of cyber components, or numerical models. Researchers run tests involving the coupled system, and data collected from the testbed allows them to better understand autonomy and resilience, as well as establish guidelines for the design and operation of future space habitats, furthering the goals of RETHi.
“With the rise of deep space exploration, the need for having a habitat designed to transition smoothly between a dormant and crewed state is growing,” said Luca Vaccino, a fourth year PhD student in mechanical engineering. “With HabSim, we are able to model the habitat, the disruption, how those disruptions propagate within the entire system, and then the different repair strategies we could implement.”
Their research on HabSim was recently published in the American Institute of Aeronautics and Astronautics Journal.
Vaccino first introduced a micrometeorite impact to the habitat. HabSim addresses five main areas when a disruption occurs: a leak, removal of dust, temperature and pressure of the habitat, heaters, and power load.
Each scenario tested prioritized a different one of those areas while employing both single- and multiple-contingency strategies. However, it was found that a single-contingency response is not enough to restore the habitat to normal conditions. It was found that a multiple-contingency response which factored in dust removal from nuclear radiators, and compensated for temperature and pressure decreases was found to be the most effective for recovering the habitat. The testbed’s ability to test different scenarios and develop new knowledge about Smarthab operation marks a significant step in advancing space exploration.
Furthermore, these findings open the door to many other possibilities. Moving forward, they hope to use HabSim to test other disruptions such as fires, moonquakes, leaks, and dust accumulation while also assessing safety controls. Future work will also focus on implementing alternate contingency strategies, consider different scheduling optimization algorithms, and demonstrate the necessity of transition scheduling for deep space habitat missions.
“Simulation tools are extremely important for highly interconnected systems,” explained Vaccino. “HabSim is now open to the public, and I fully expect that it will be useful to our colleagues and other researchers around the world.”
Source: Luca Vaccino, lvaccino@purdue.edu
Writer: Julia Davis, juliadavis@purdue.edu
Exploring Contingency Responses to Disruptive Events During Transitions in Deep Space Missions
Luca Vaccino, Mohsen Azimi, Shirley J. Dyke and Dawn Whitaker
https://doi.org/10.2514/1.J063844
ABSTRACT: The successes associated with the Artemis 1 mission have reinforced the interest in deep space exploration, inspiring future missions to the moon and Mars. However, the extended duration and traveling distances of these missions require the development of procedures to accommodate dormant and crewed states and the transitions between them, which results in new risks for both crew and equipment. Consequently, the development of contingency plans is necessary to support crew safety and mission execution during transitions. In this paper we explore the use of the HabSim virtual testbed, a simulation tool for running different disruption scenarios in a space habitat. We perform an illustrative study that involves a disruptive event occurring during the crew ingress into a space habitat that has been dormant for a prolonged time. The purpose of this study is to illustrate how contingency strategies can mitigate the hazard and support a successful transition from dormant to crewed states. Various choices made for recovering the system and completing the transition are explored, involving action rescheduling and agent intervention. The results show how simulations may be used to advance transition and contingency planning, contributing to the safety and success of space missions.